[exemplo] acelerómetro e giroscópio MPU-6050
Objetivo:
Demonstrar o uso de sensor com acelerómetro e giroscópio para obter dados de sensores inerciais.
Lista de material:
 |
 |
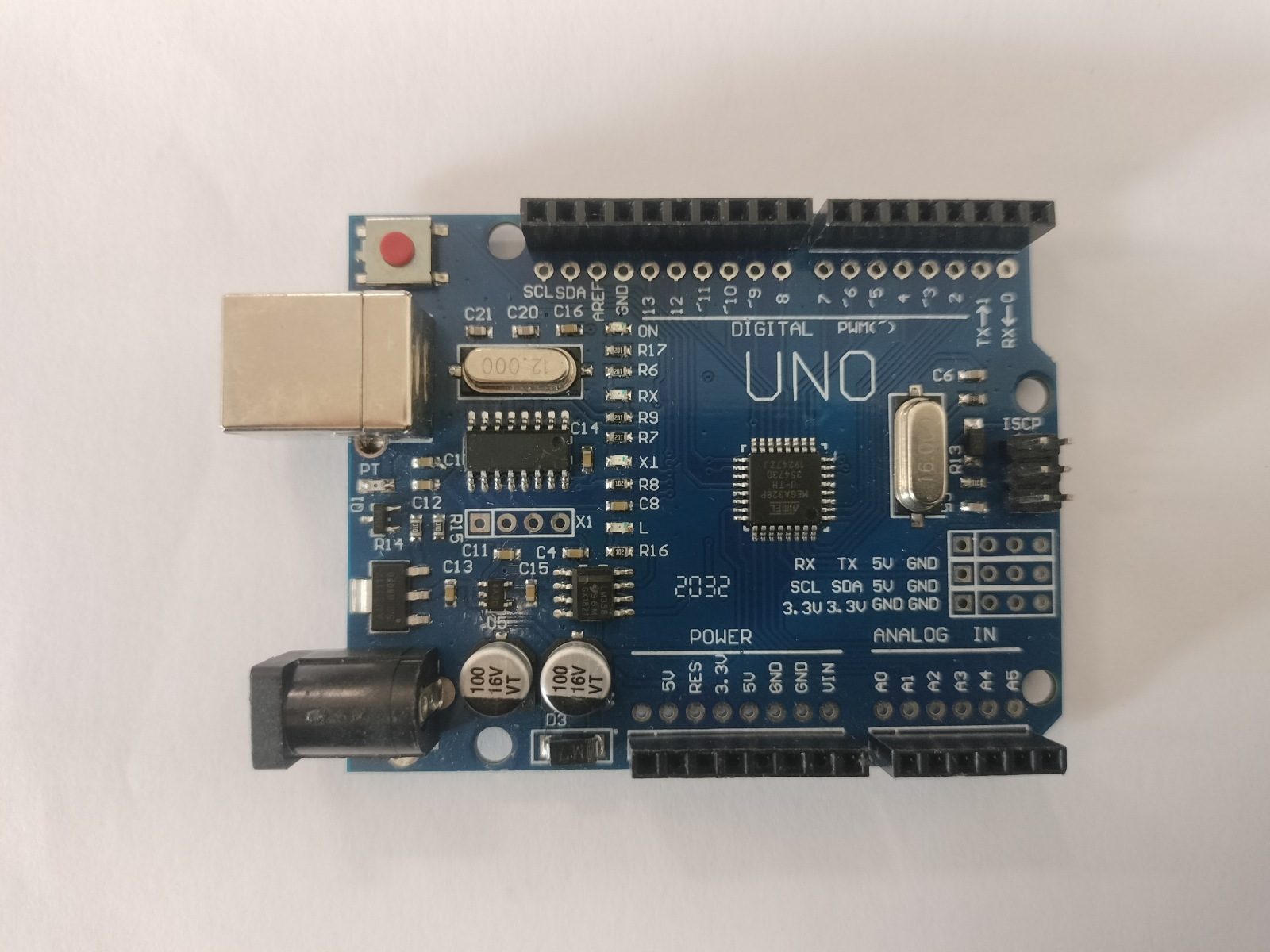
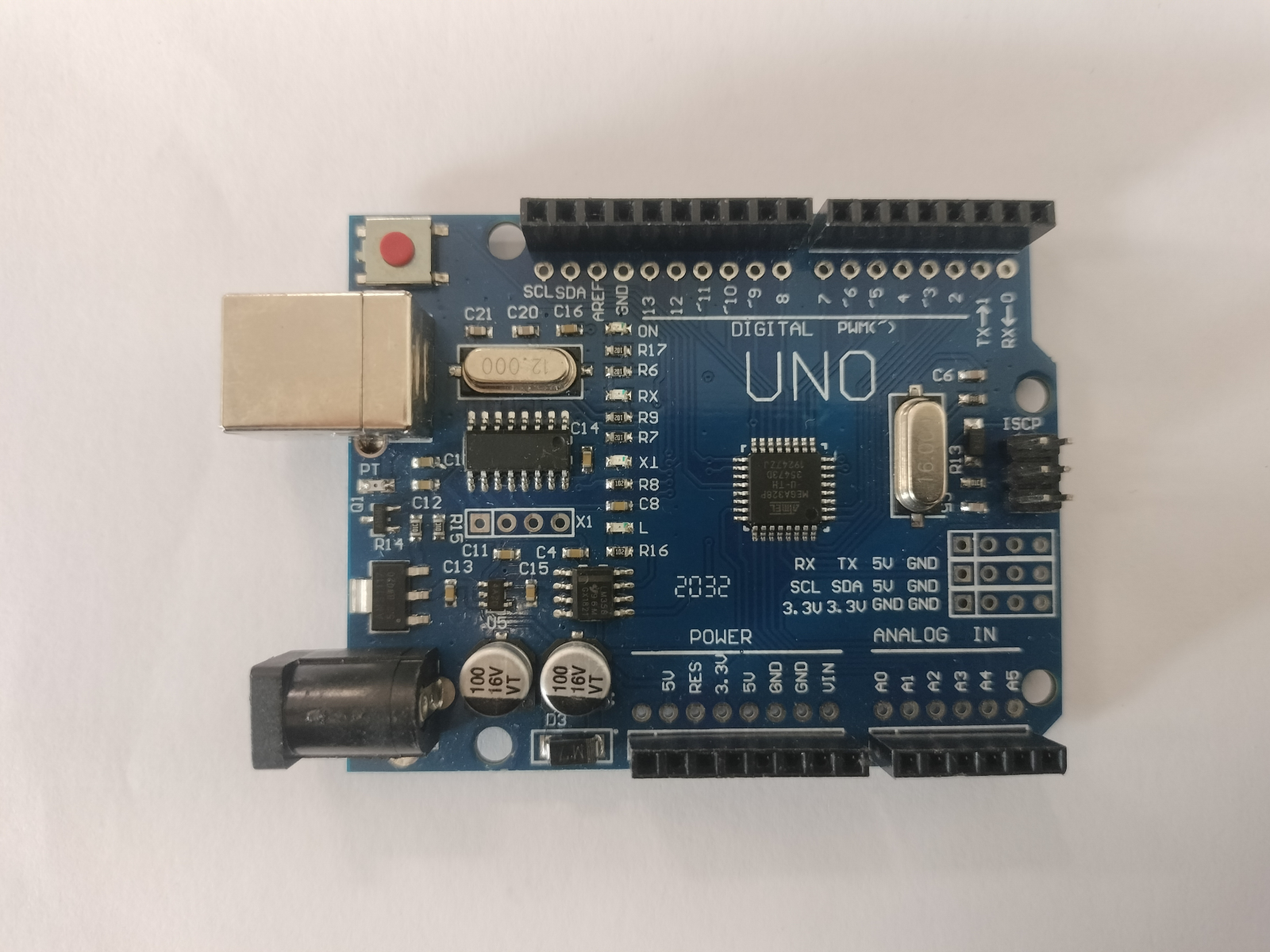
| Fig.1 - Placa Arduino compatível UNO. |
 |
 |
| Fig.2 - Sensor MPU-6050. |
Contextualização:
Uma unidade de medição inercial (IMU do inglês inertial measurement unit) é um dispositivo eletrónico que permite quantificar a força específica de um corpo, a taxa angular e, por vezes, a orientação do corpo, usando uma combinação de acelerómetros, giroscópios e, às vezes, magnetómetros [1].
 |
 |
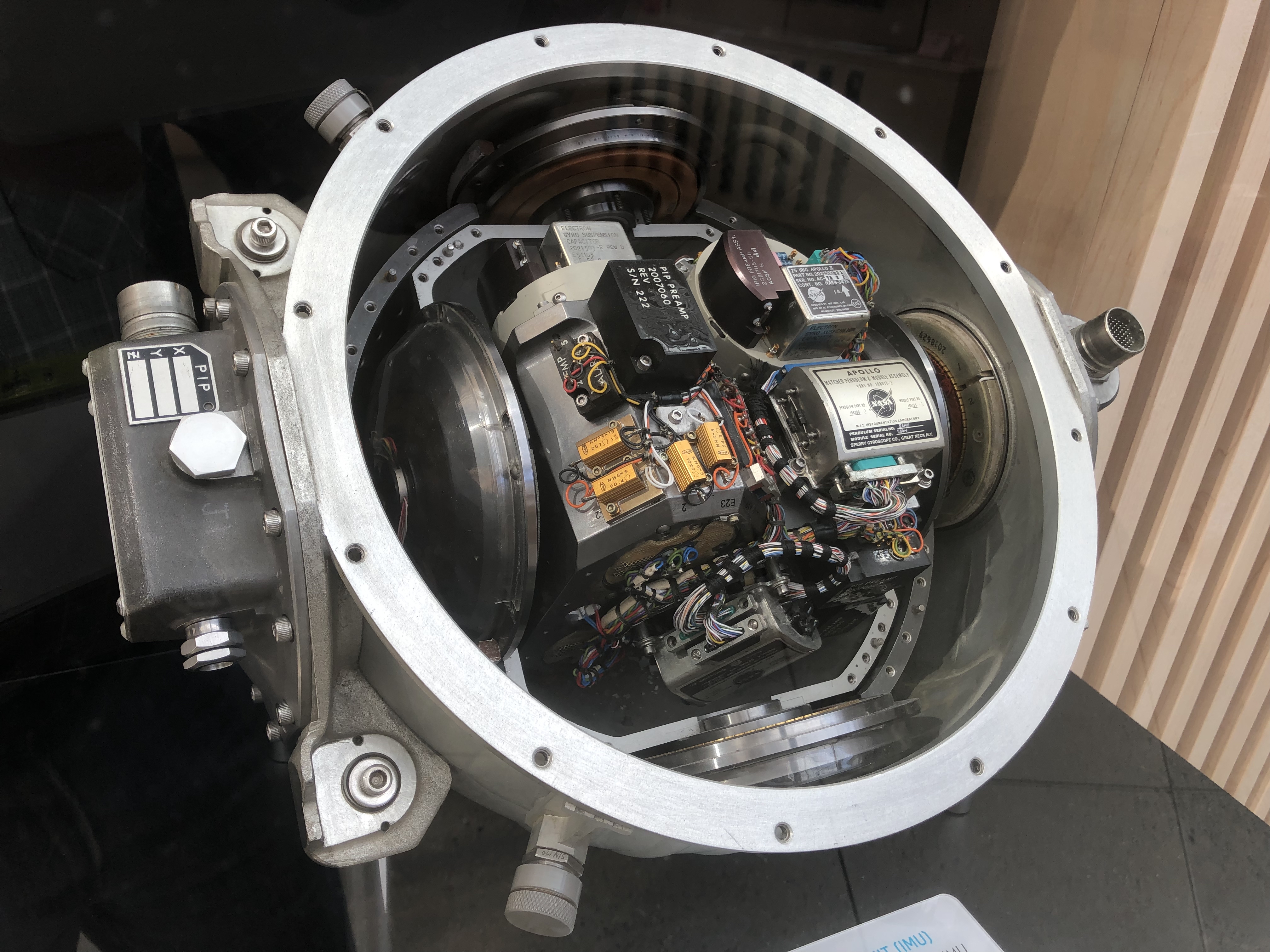 |
| Fig.3 - Ilustrações dos principais componentes do sistema de orientação do módulo de comando e serviço Apollo, um dos componentes usado para o programa Apollo, que pousou astronautas na Lua entre 1969 e 1972. |
Set-up
 |
| placa Arduino compatível UNO |
|
sensor MPU-6050 |
| 3.3V |
---------------------- |
VCC |
| GND |
---------------------- |
GND |
| A5 |
---------------------- |
SCL |
| A4 |
---------------------- |
SDA |
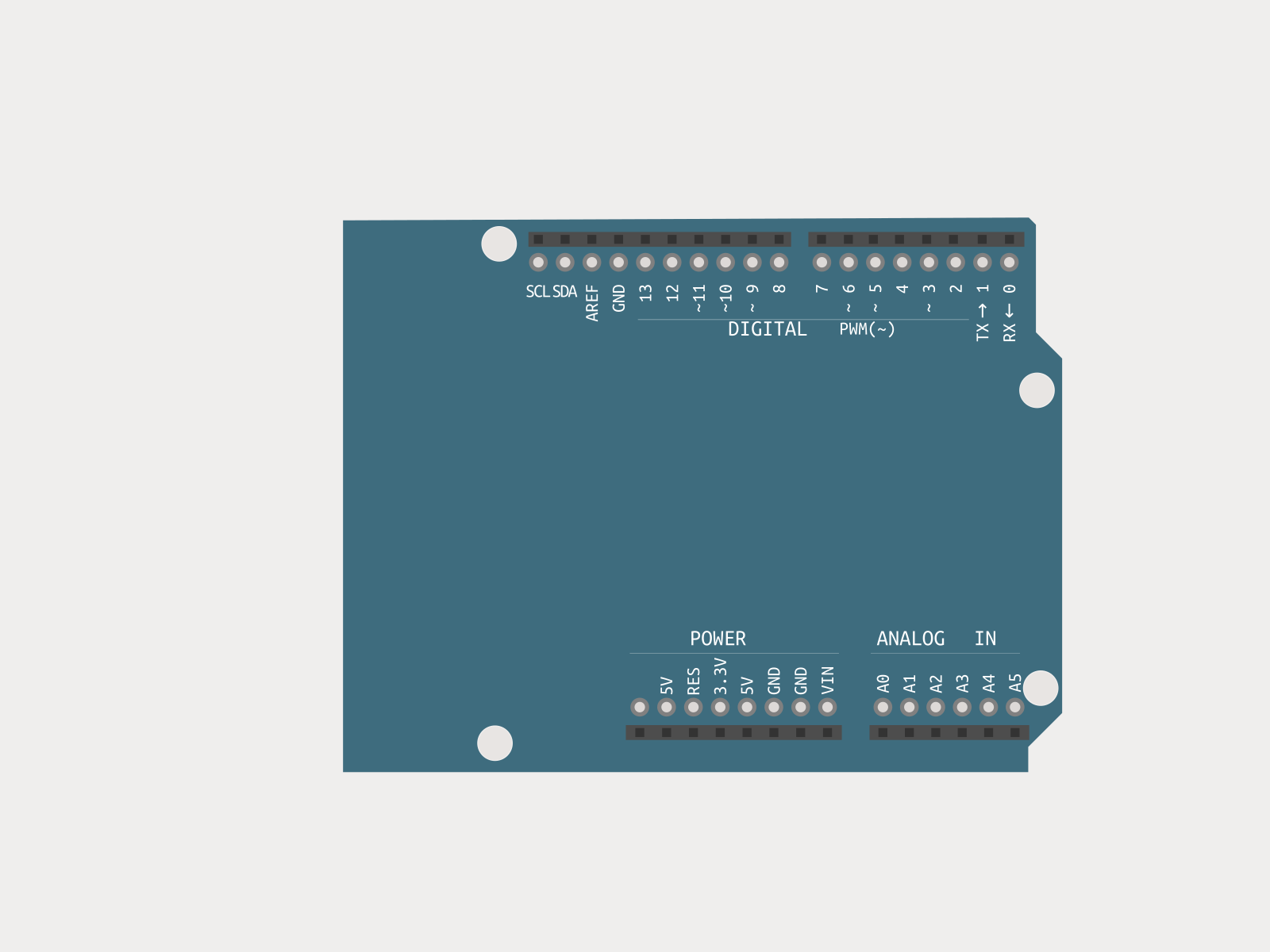
| Fig.4 - Montagem ilustrativa das ligações a estabelecer entre placa de desenvolvimento e sensor MPU-6050. |
Bibliotecas
 |
 |
 |
| Fig.5 - Exemplo de utilização do gestor de bibliotecas do IDE Arduino para instalação da biblioteca Adafruit MPU6050. |
Programa
// Demonstração de utilização de sensor Adafruit MPU6050
#include "Adafruit_MPU6050.h"
#include "Adafruit_Sensor.h"
#include "Wire.h"
Adafruit_MPU6050 mpu;
void setup(void) {
Serial.begin(115200);
while (!Serial)
delay(10);
Serial.println("a testar sensor MPU6050!");
// Try to initialize!
if (!mpu.begin()) {
Serial.println("Falhou inicialização de MPU6050");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 inicializado!");
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
Serial.print("Gamara de valores selecionada para acelerómetro: ");
switch (mpu.getAccelerometerRange()) {
case MPU6050_RANGE_2_G:
Serial.println("+-2G");
break;
case MPU6050_RANGE_4_G:
Serial.println("+-4G");
break;
case MPU6050_RANGE_8_G:
Serial.println("+-8G");
break;
case MPU6050_RANGE_16_G:
Serial.println("+-16G");
break;
}
mpu.setGyroRange(MPU6050_RANGE_2000_DEG);
Serial.print("Gamara de valores selecionada para giroscópio: ");
switch (mpu.getGyroRange()) {
case MPU6050_RANGE_250_DEG:
Serial.println("+- 250 deg/s");
break;
case MPU6050_RANGE_500_DEG:
Serial.println("+- 500 deg/s");
break;
case MPU6050_RANGE_1000_DEG:
Serial.println("+- 1000 deg/s");
break;
case MPU6050_RANGE_2000_DEG:
Serial.println("+- 2000 deg/s");
break;
}
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
Serial.print("Filtro a considerar: ");
switch (mpu.getFilterBandwidth()) {
case MPU6050_BAND_260_HZ:
Serial.println("260 Hz");
break;
case MPU6050_BAND_184_HZ:
Serial.println("184 Hz");
break;
case MPU6050_BAND_94_HZ:
Serial.println("94 Hz");
break;
case MPU6050_BAND_44_HZ:
Serial.println("44 Hz");
break;
case MPU6050_BAND_21_HZ:
Serial.println("21 Hz");
break;
case MPU6050_BAND_10_HZ:
Serial.println("10 Hz");
break;
case MPU6050_BAND_5_HZ:
Serial.println("5 Hz");
break;
}
Serial.println("");
delay(100);
}
void loop() {
/* leitura dos valores reportados */
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
/* impressão das leituras */
Serial.print("Aceleração X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("Rotação X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("Temperatura: ");
Serial.print(temp.temperature);
Serial.println(" ºC");
Serial.println("");
delay(500);
}
|
| Código.1 - Programa exemplo de utilização de sensor MPU-6050 e biblioteca Adafruit MPU6050 com placa Arduino compatível UNO. |
Referências
[1] Wikipedia. Unidade de medição inercial. url: https://en.wikipedia.org/wiki/Inertial_measurement_unit (acedido em 26/04/2024).
No comments to display
No comments to display